



 应用分类:其他应用
应用分类:其他应用
 应用行业:其他
应用行业:其他
 案例地址:广东省深圳市宝安区
案例地址:广东省深圳市宝安区
 发布时间:2020-12-08
发布时间:2020-12-08
 935
935
自对位应用①产品放置在相机视野中,视觉系统拍摄靶标建立靶标基准位置;②重新放置产品在相机视野中,视觉系统拍摄靶标计算与靶标基准位置的偏差;③操控运动机构执行偏差纠偏直到偏差小于设定值;④完成纠偏后,再执行设备下一步动作。主要应用领域有上下料设备、COG、FOG、PCB、丝印、小家电组装等。
对位目标固定,设定对位目标位置后,每次都与目标位置比较,计算出位置偏差,使与目标位置中心角度重合。
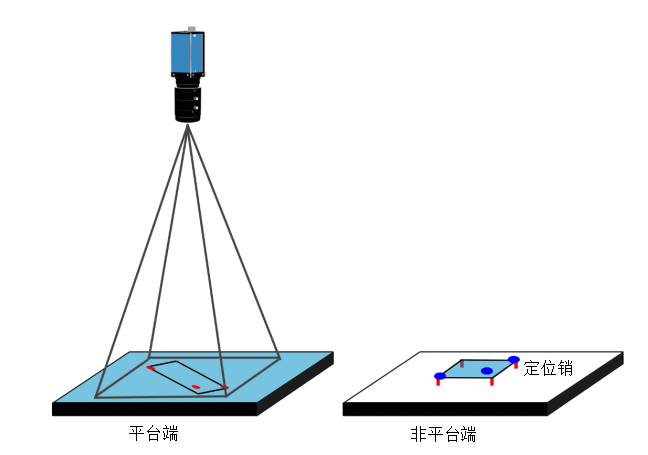
1.单目单Mark自对位模型
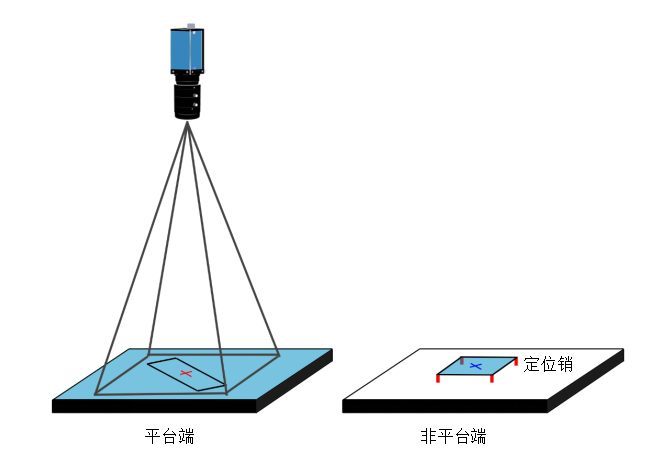
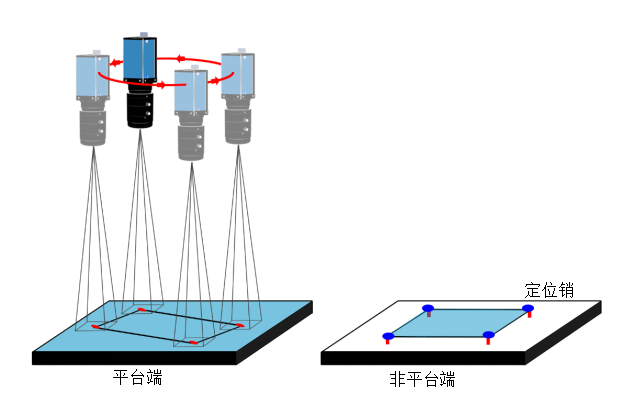
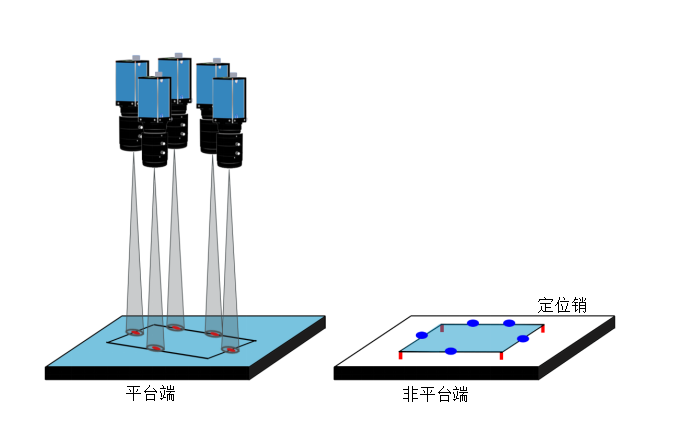
说明:非平台端上的产品通过定位销或其他方式确保来料都是在相对固定的位置,平台端的产品来料位置不固定,但是Mark与产品的相对位置固定,确保Mark在相机视野内(通常是将产品抓起后再拍摄防止拍完再抓导致产品移动或变形)。根据纠偏算法找到偏移量。根据偏移量将平台端的产品贴到非平台端上。
纠偏方法:以产品的整个轮廓或客户指定的图形作为Mark,通过灰度匹配或轮廓匹配求偏移。
应用场景:小尺寸产品或精度要求不高的产品
适用产品:如fpc与钢片的贴合
适用尺寸:小尺寸
精度:±0.05mm左右
2.单目双Mark自对位模型
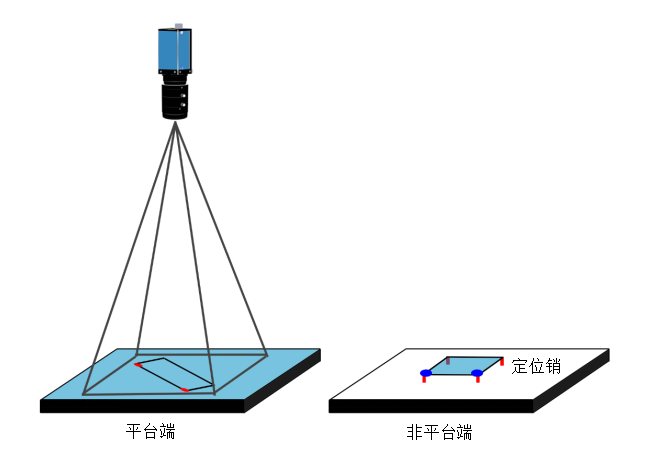
该模型下常见的Mark标志方法如下:
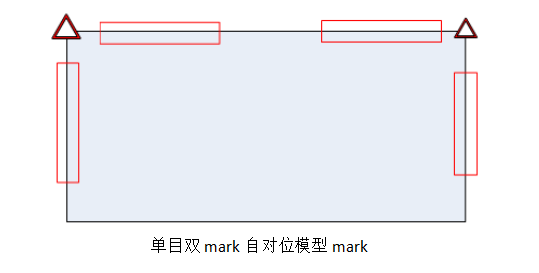
说明:非平台端上的产品通过定位销或其他方式确保来料都是在相对固定的位置,平台端的产品来料位置不固定,但是Mark与产品的相对位置固定,确保两个Mark都在相机视野内(通常是将产品抓起后再拍摄防止拍完再抓导致产品移动或变形)。根据纠偏算法找到偏移量。根据偏移量将平台端的产品贴到非平台端上。
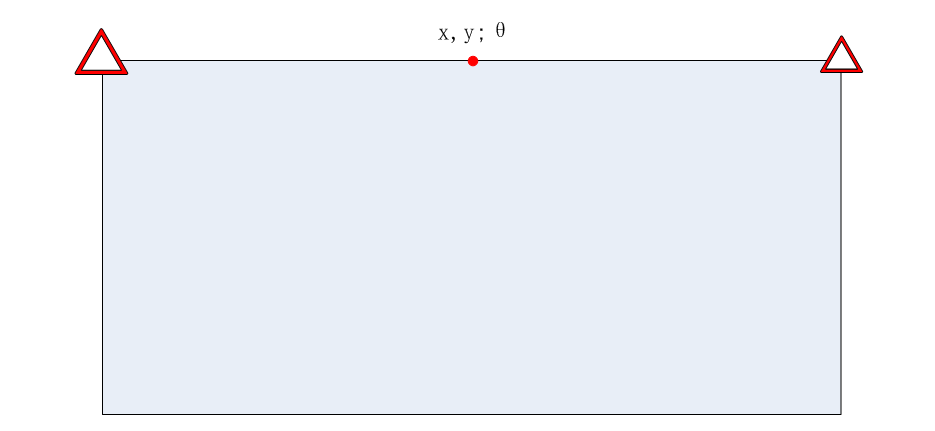
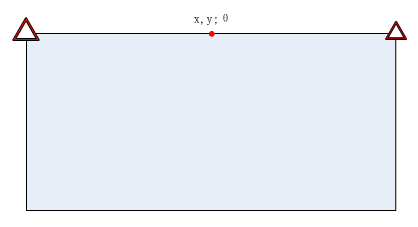
纠偏方法:如上图所示,双Mark对位会用到两个交点,通常是长边的两个端点或对角线的两个端点。如果客户有特殊要求,可以按照客户要求的Mark点进行对位。以找长边的两个端点作为Mark点为例:拟合直线并求出直线交点(上图三角形位置);两个交点形成线段的中心点作为(x,y),两个交点对应的角度为θ;x,y,θ与基准的差值为偏移量。
应用场景:相同环境下单目双Mark比单目单Mark精度高
适用尺寸:小尺寸
精度:通常±0.05mm
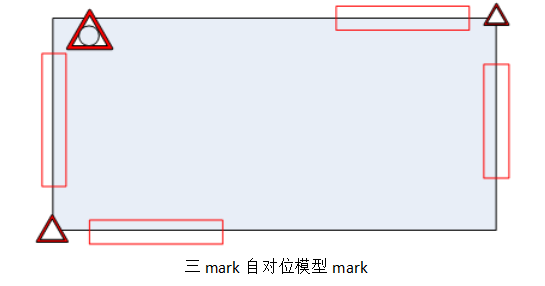
3.单目三Mark自对位模型
该模型下常见的Mark标志方法如下:
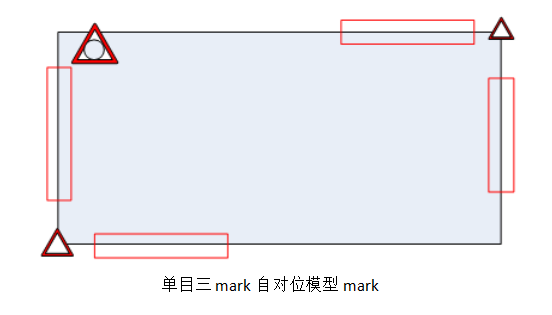
说明:非平台端上的产品通过定位销或其他方式确保来料都是在相对固定的位置,平台端的产品来料位置不固定,但是Mark与产品的相对位置固定,确保所有Mark点在相机视野内(通常是将产品抓起后再拍摄防止拍完再抓导致产品移动或变形)。根据纠偏算法找到偏移量,根据偏移量将平台端的产品贴到非平台端上。
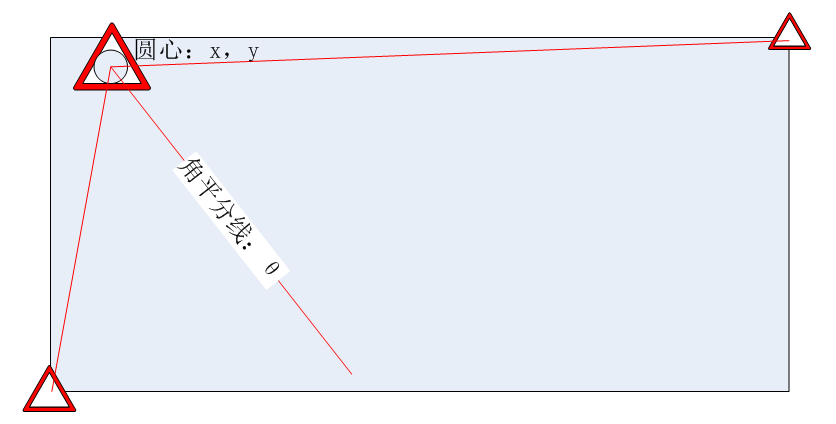
纠偏方法:如上图所示,三Mark对位会用到三个交点,通常是对角线的两个端点和客户指定的一个Mark点。如果客户有特殊要求,可以按照客户要求的Mark点进行对位。这种方式比较灵活,选取Mark点的方式也比较多。对角线端点+客户指定Mark点为例:如上图,通过直线拟合找到四条直线;通过直线求得对角线的两个端点;通过拟合圆找到指定的Mark圆心;两个端点分别与圆心连线;圆心坐标定为(x,y),两条连线形成夹角的角平分线的角度作为θ;x,y,θ与基准的差值为偏移量。
应用场景:该模型并不常用,属于比较特殊的应用模型,但是相同环境下精度比单目单/双Mark更高
适用产品:客户要求使用这种定位方式时
适用尺寸:小尺寸
精度:±0.05mm
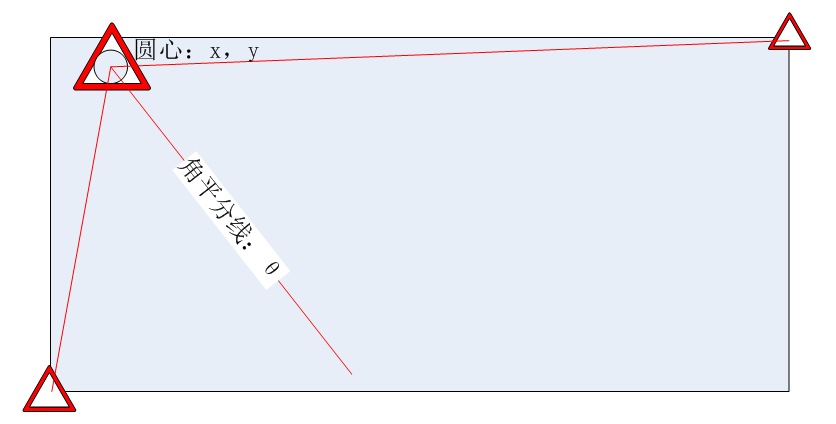
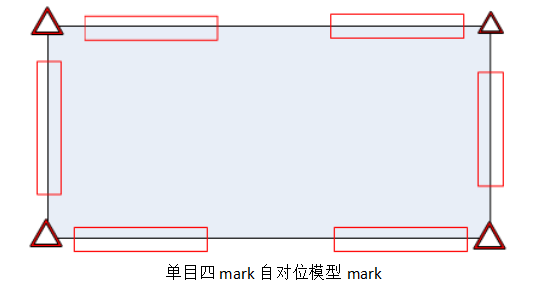
4.单目四Mark自对位模型

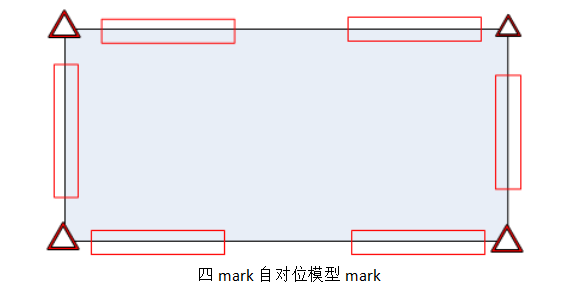
该模型下常见的Mark标志方法如下:
说明:非平台端上的产品通过定位销或其他方式确保来料都是在相对固定的位置,平台端的产品来料位置不固定,但是Mark与产品的相对位置固定,确保Mark在相机视野内(通常是将产品抓起后再拍摄防止拍完再抓导致产品移动或变形)。根据纠偏算法找到偏移量,根据偏移量将平台端的产品贴到非平台端上。
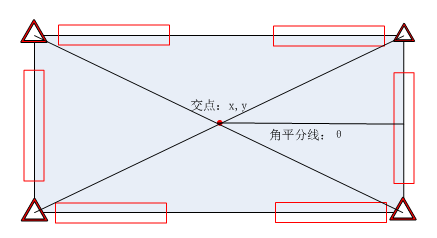
纠偏方法:四Mark对位会用到四个交点,通常是矩形的四个角点。如果客户有特殊要求,可以按照客户要求的Mark点进行对位。以矩形的四个角点为例:如上图,通过直线拟合找到四条直线;找到四条直线的交点即矩形的四个角点;求出对角线的交点坐标定为(x,y);对角线形成夹角的角平分线的角度作为θ;x,y,θ与基准的差值为偏移量。
应用场景:相同环境下精度比单目单/双/三Mark更高
适用产品:客户要求精度较高时
适用尺寸:小尺寸
精度:±0.05mm
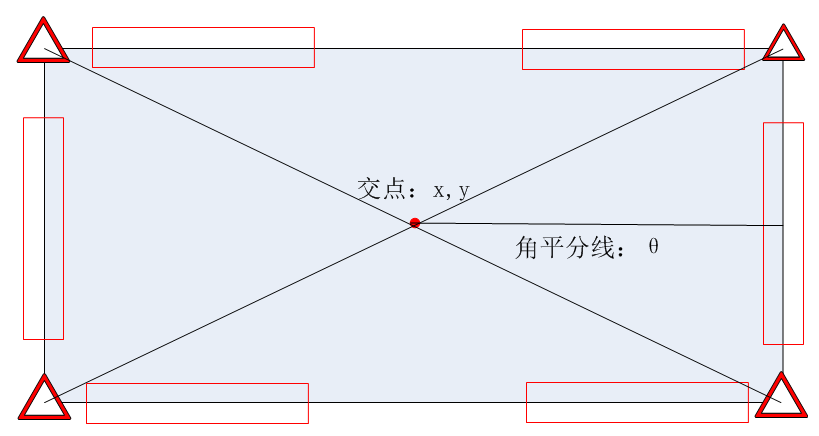
5.双Mark自对位模型
双mark自对位模型(1)---单相机模型,如下图:

双mark自对位模型(2)---双相机模型,如下图:

该模型下常见的Mark标志方法如下:
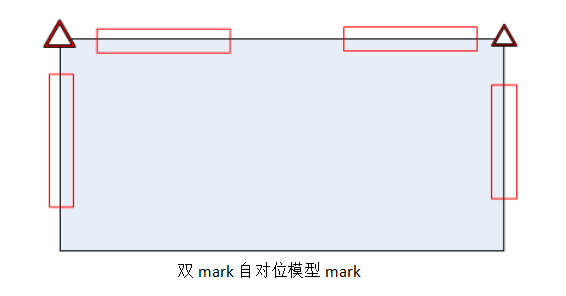
说明:双Mark自对位有单相机和双相机两种情况,相机都是在平台端。单相机模型拍摄完一个交点后移动位置拍摄另一个交点,双相机模型两个相机分别拍摄两个交点。非平台端上的产品通过定位销或其他方式确保来料都是在相对固定的位置,平台端的产品来料位置不固定,找出两个交点后。根据纠偏算法找到偏移量,根据偏移量将平台端的产品贴到非平台端上。
纠偏方法:如上图所示,同单目双Mark。
应用场景:弥补单目双Mark应用在较大尺寸产品时精度不够的问题,相对单目双Mark精度更高
适用产品:较大产品
适用尺寸:100~200mm
精度:±0.05mm
6.三Mark自对位模型
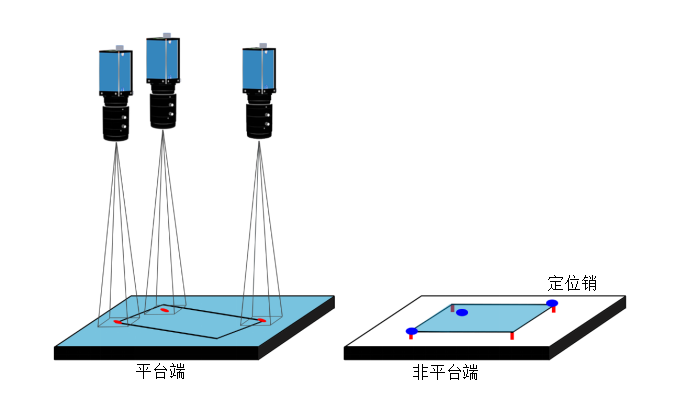
三mark自对位模型(1)---单相机模型,如下图:
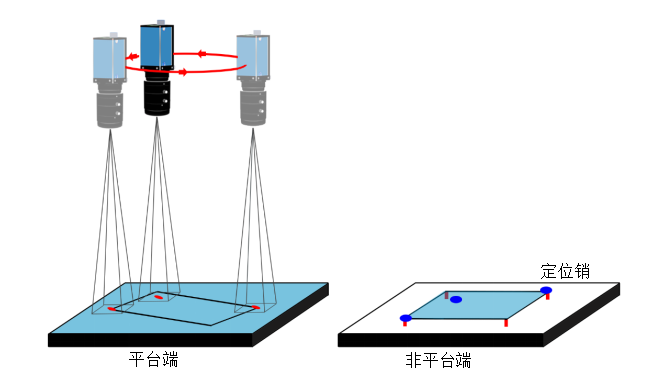
三mark自对位模型(2)---三相机模型,如下图:
该模型下常见的Mark标志方法如下(同单目三Mark):
说明:三Mark自对位有单相机和三相机两种情况,相机都是在平台端。单相机模型拍摄完一个交点后移动位置拍摄另一个交点,三相机模型的三个相机分别拍摄三个交点。非平台端上的产品通过定位销或其他方式确保来料都是在相对固定的位置,平台端的产品来料位置不固定,找出三个交点后,根据纠偏算法找到偏移量,根据偏移量将平台端的产品贴到非平台端上。
纠偏方法:如上图所示,同单目三Mark。
应用场景:弥补单目三Mark应用在较大尺寸产品时精度不够的问题,相对单目三Mark精度更高
适用产品:较大产品
适用尺寸:>200mm
精度:±0.05mm
7.四Mark自对位模型
四mark自对位模型(1)---单相机模型,如下图:
四mark自对位模型(2)---四相机模型,如下图:

该模型下常见的Mark标志方法如下(同单目四Mark)
说明:四Mark自对位有单相机和四相机两种情况,相机都是在平台端。单相机模型拍摄完一个交点后移动位置拍摄另一个交点,四相机模型的四个相机分别拍摄四个交点。非平台端上的产品通过定位销或其他方式确保来料都是在相对固定的位置,平台端的产品来料位置不固定,找出四个交点后,根据纠偏算法找到偏移量,根据偏移量将平台端的产品贴到非平台端上。
纠偏方法:如上图所示,同单目四Mark。
应用场景:弥补单目四Mark应用在较大尺寸产品时精度不够的问题,相对单目四Mark精度更高
适用产品:较大产品
适用尺寸:>200mm
精度:±0.05mm
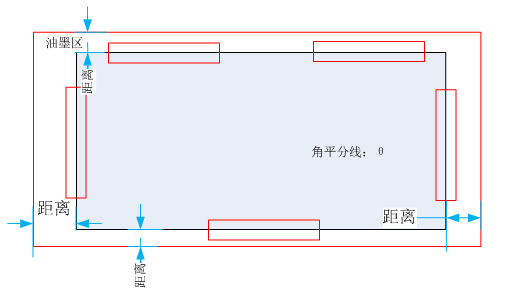
8.四相机抓边自对位应用

该模型下常见的Mark标志方法如下(同单目四Mark):
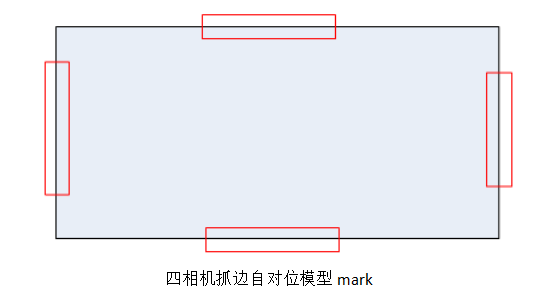
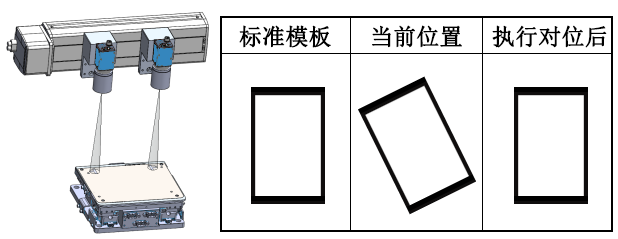
说明:四相机抓边自对位模型中相机都是在平台端。四个相机模型的四个相机分别拍摄平台端矩形产品的四条边。非平台端上的产品通过定位销或其他方式确保来料都是在相对固定的位置,平台端的产品来料位置不固定。找出四条边后根据纠偏算法找到偏移量,根据偏移量将平台端的产品贴到非平台端上。
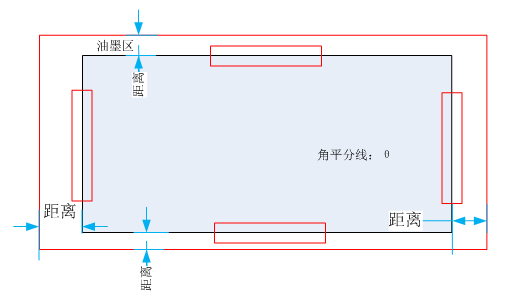
纠偏方法:四相机抓边自对位是用于丝印系统的专门对位模型。四个相机分别抓取平台端产品的四条边,测量四条边到基准模板对应的四条边的距离,根据距离判断产品是否摆正。
应用场景:专用于丝印产品,例如矩形屏手机的油墨区印刷
适用产品:丝印产品
适用尺寸:较大尺寸
精度:±0.02mm
9.五相机抓边自对位应用
该模型下常见的Mark标志方法如下:
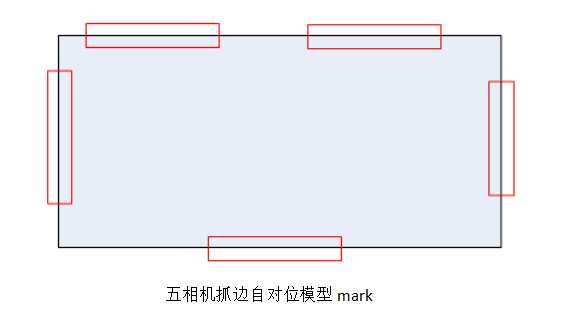
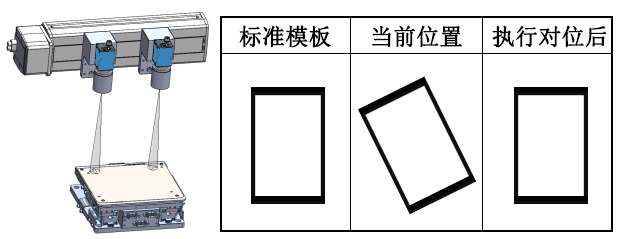
说明:五相机抓边自对位模型与四相机抓边自对位模型比较接近,相机都是在平台端。区别在于四相机抓边模型的四个相机分别拍摄平台端矩形产品的四条边,五相机抓边模型中有一条长边需要两个相机分别抓一端。非平台端上的产品通过定位销或其他方式确保来料都是在相对固定的位置,平台端的产品来料位置不固定。找出五条边后,根据纠偏算法找到偏移量。根据偏移量将平台端的产品贴到非平台端上。
纠偏方法:五相机抓边自对位是用于丝印系统的专门对位模型。五相机抓边纠偏方法与四相机类似,区别在于五相机抓边在一条长边上会抓取两条直线,两条直线的角度平均值作为θ。
应用场景:五相机抓边模型比四相机抓边模型多了角度纠偏,更适合弧角的矩形屏手机的油墨区印刷对位
适用产品:丝印产品
适用尺寸:较大尺寸
精度:±0.02mm