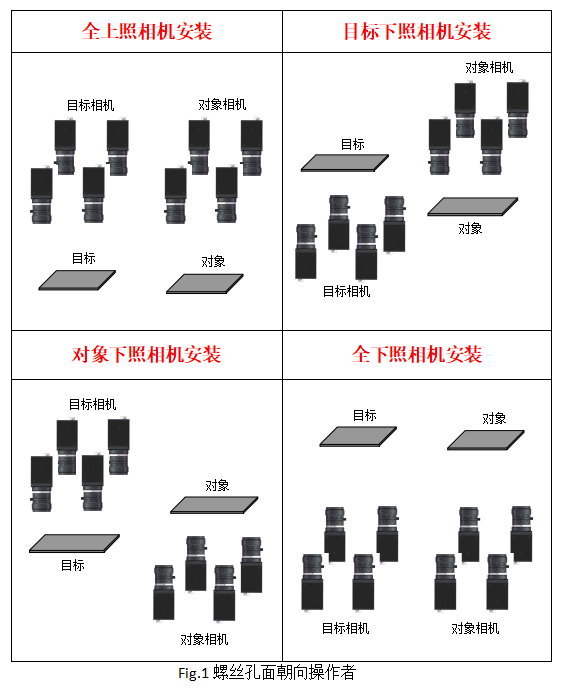
1、 相机安装
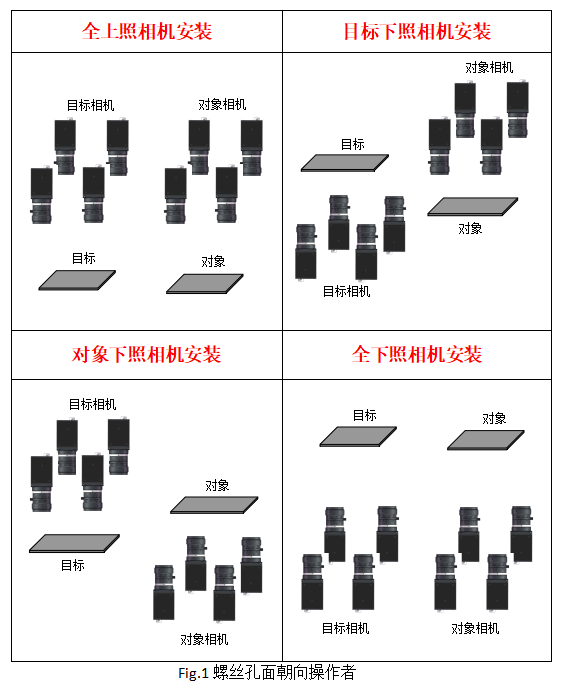
相机的安装方向:以操作者站立调试的位置为基准(一般就是显示器的位置),相机的螺丝孔面朝向操作者,标签面(即正面)远离操作者。这样才能保证实际图像和显示器图像保持一致性,方便调试。
2、 软件权限的登陆
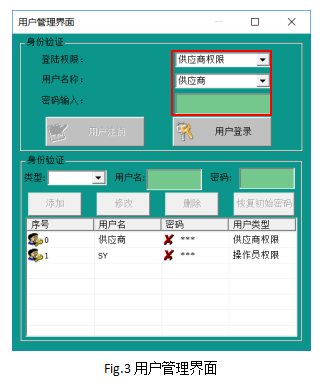
① 点击软件左上角的“橙色图标”,点击“用户”进入用户设置界面;

② 用户管理界面,输入供应商权限密码:“310525”,点击“用户登陆”,进入软件管理权。
③ 有登陆权限,才可以设置软件参数,修改产品模板,非登陆状态,不能更改以上数据。
3、 设置待机位(控轴)

设定对位平台的待机位原则即是:使对位平台的行程最大化。即要求对位平台各轴到正负限位的距离相等。
设置待机位之前需要启动复位进行平台回零,回零完成后点击“轴操作/IO监控”->“手动操作”弹出轴操作界面,选择X1轴,填写点动距离,通过手动点击正反转操控X1轴到限位中间位置,最后点“保存点位”。同理设定X2轴和Y轴的待机位置,如此便完成了对位平台待机位的设定。
4、 产品换型
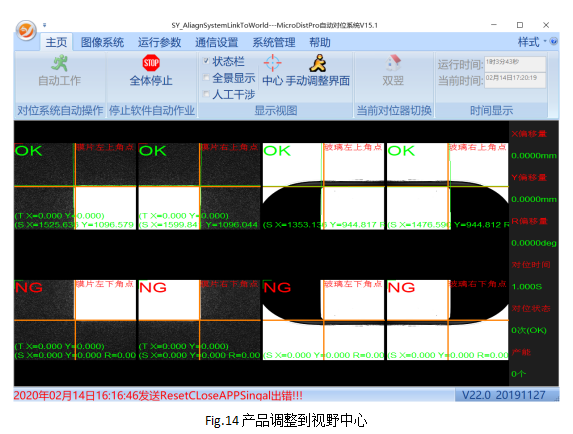
4.1、产品上料,调整到CCD中心
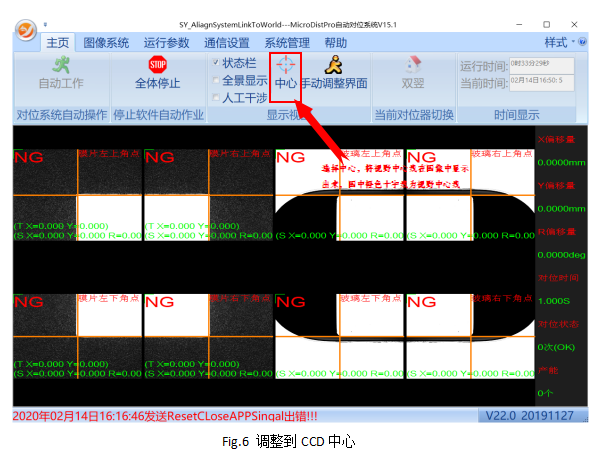
软件上点击中心,在图像中可以看到橙色的十字线,这个为视野中心,在产品上料过程中,我们需要将产品放置到橙色十字交点即视野中心位置。
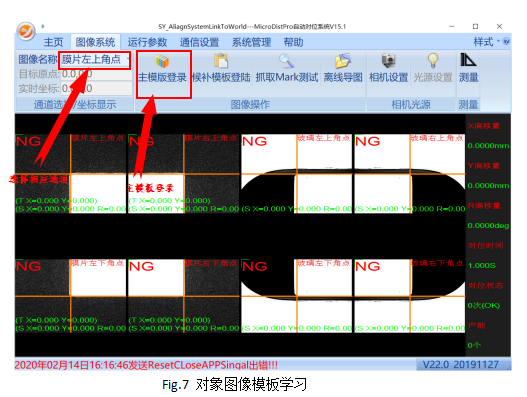
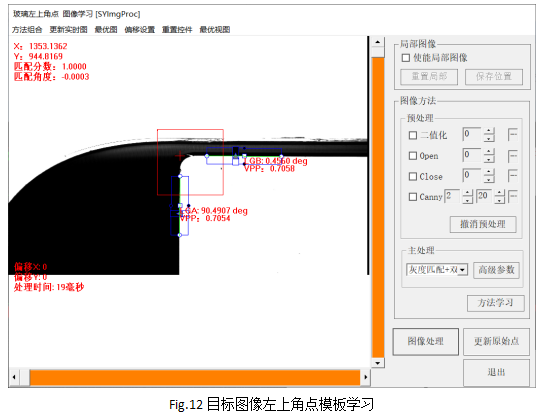
4.2、对象图像模板学习
Step1:如图7所示,通过“通道名称”处选择我们要进行模板学习的通道:“膜片左上角点”,然后点击“主模板登录”进行图像的模板学习。
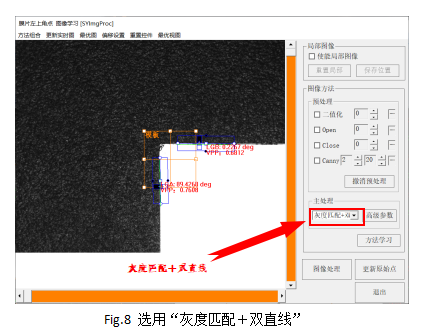
Step2:如图8所示,下拉重新选择“灰度匹配+双直线”,黄色的模板框工具和蓝色的直线工具则会显示出来,通过拖拽调整先使两个直线工具的中线分别与产品的水平边和垂直边的边缘相接,然后调整模板框位置和大小到合适,再点击“方法学习”,则学习记录当前的模板。注意直线工具的极性和找边方向。
Step3:调整高级参数。点击“高级参数”,进入高级参数界面,调整参数如下图9与图10。可根据实际情况修改“分数”、“角度容差”、“滤波次数”、“有效点比例”、“直线夹角误差”等参数。
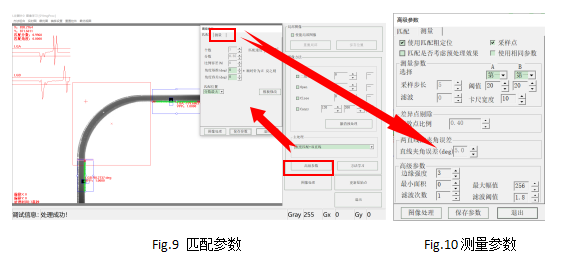
使用匹配粗定位:
抓边工具位置是否需要关联匹配粗定位的坐标结果,默认勾选
匹配是否考虑预处理:
采用模板匹配结果来定位抓边工具时,是否需要使用预处理后的图像做匹配粗定位,默认不勾选
使用相同参数:
抓边工具的阈值参数分开设定还是使用相同的参数,默认勾选
采样步长:
卡尺工具间距,一般设置为卡尺宽度的1/2,这样目标边边缘的采样点就不会遗漏
阈值:
黑白灰阶过度的门限值,默认值20
滤波:
滤除图像中的噪声,默认值为0。目前这个参数不建议使用
卡尺宽度:
卡尺工具的宽度,例如卡尺宽度是10代表会在是个像素点的宽度范围内取到一个有效点。默认值为10
有效点比例:
有效点的上限值,默认值为0.5
聚类:
该功能不建议使用,默认为不勾选
直线夹角误差:
直线夹角误差(与90比较)的上限
边缘强度:
周围象素灰度有阶跃变化的那些象素的集合,例如设置为3代表软件会用相邻3个像素的灰阶进行比较得出一个像素跳变的像素点。这种方式求出的像素跳动点相对稳定一下。默认值为3
滤波次数:
执行滤波的次数,默认值为1
滤波强度:
执行滤波的强度,默认值为1.8,值越小滤波强度越大
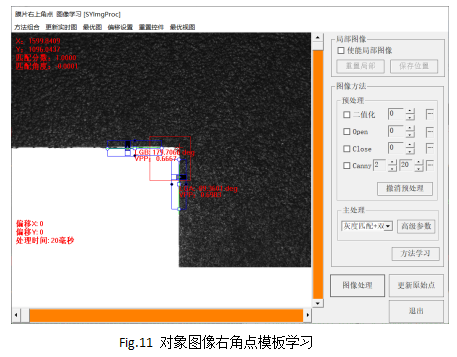
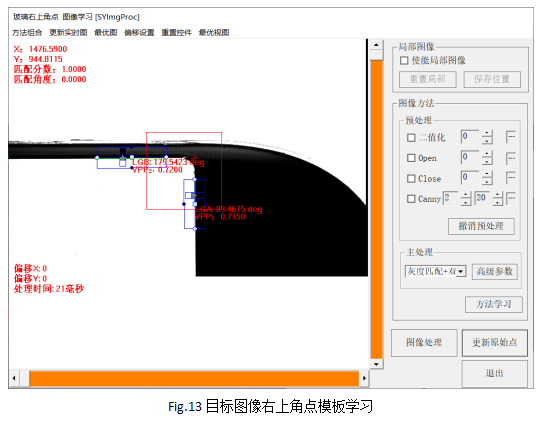
Step4:依次学习对象图像右上角点模板、左下角点模板、右下角点模板,方法与前面相同
4.3、目标图像模板学习
图像学习方法与前面相同:4.2。
5、 相机自动标定
相机自动标定流程主要目的是建立相机和对位平台的关系。
5.1、调整产品到视野中心
5.2、相机自动标定
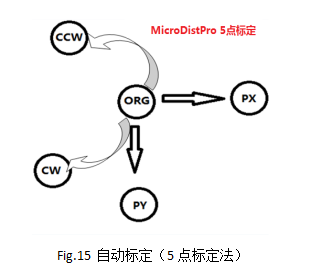
相机标定,通过机器手平台自动完成相机和平台的关系建立,特别方便客户换型,用户只需要1分钟即可完成标定。
系统全体停止的状态下点击“运行参数”->“系统标定”,弹出标定界面后,点击“启动标定”即可开始标定,系统提示标定完成即完成标定。

6、 相机映射
相机映射的目的是建立对象相机与目标相机之间的关系。
6.1、学习映射通道的模板
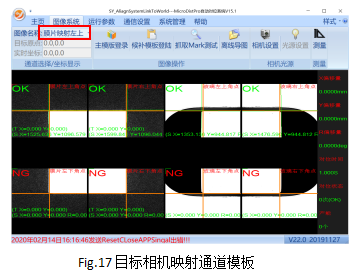
Step1:将方形TP放置到治具上通过模组搬运到目标相机下。制作映射通道的左上角点模板、右上角点模板、左下角点模板和右下角点模板,方法类似。见:4.2。
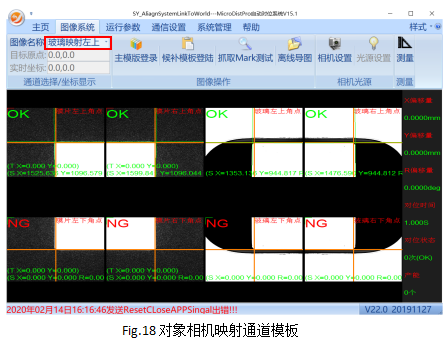
Step2:将TP搬运到对象相机下,学习对象相机映射通道的模板,方法与前面相同。见:4.2。
6.2、开始映射
自动映射:PLC配合视觉系统完成了自动映射功能的情况下可以使用自动映射。
系统全体停止的状态下,打开相机映射界面,放置好TP,点击“启动映射”,抓点OK完成第一次映射后,然后重复再做第二次映射。再点击“转换测试”进行一次转换测试。

手动映射:
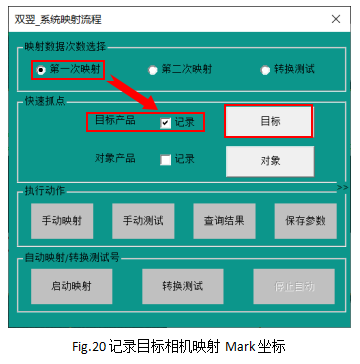
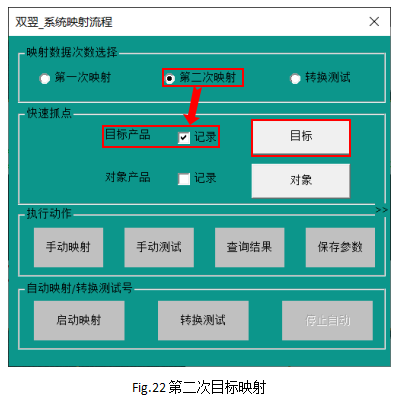
1) 系统全体停止,将TP搬运到目标相机下,打开映射界面,勾选第一次映射,再勾选目标产品“记录”,点击“目标”按钮,系统会抓取Mark点的坐标。
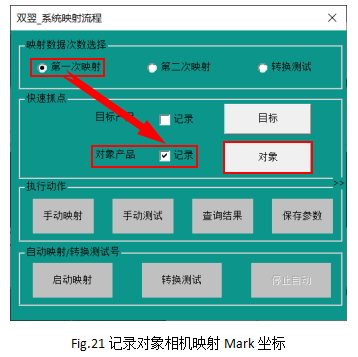
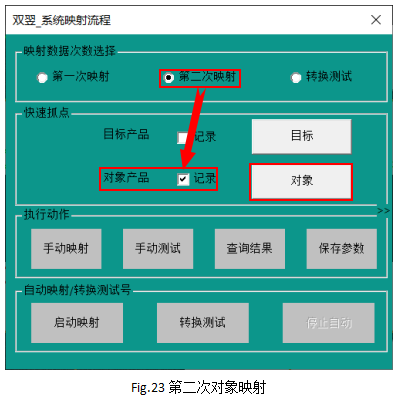
2) 通过手动控制搬运模组将TP搬运到对位平台的贴合位上,也就是对象相机的下方。再勾选对象产品“记录”,点击“对象”按钮,系统会自动抓取Mark点的坐标。
3) 勾选第二次映射,重复1)、2)步骤,再搬运一次TP,记录第二次目标坐标。
4) 通过手动控制搬运模组将TP搬运到对位平台的贴合位上,也就是对象相机的下方,记录第二次对象坐标。
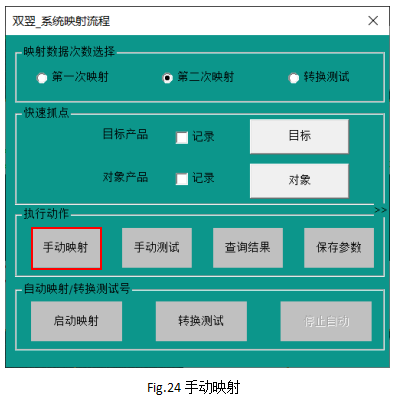
5) 点击手动映射。
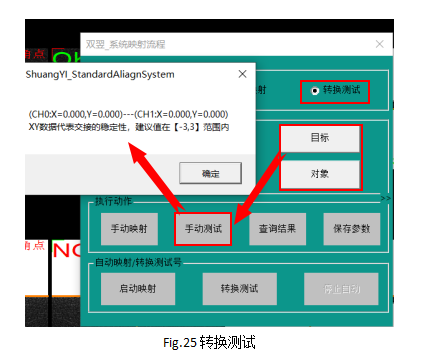
6) 勾选转换测试,再做第三次交接,步骤同上,抓点OK后点击手动测试。CH数据需要在【-3~3】范围内才算映射合格。代表产品交接稳定,否则需要检查抓点问题和机构交接的稳定性问题。
7) 手动映射需要手动保存映射数据,否则重启软件数据丢失。自动映射则会自动保存。
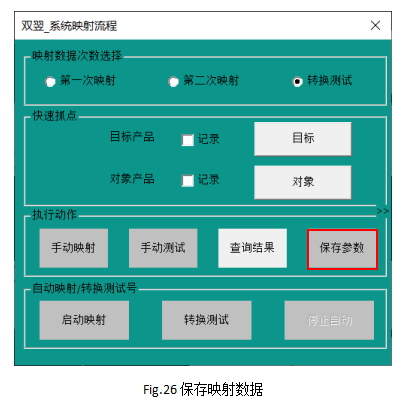
7、程序补偿功能说明
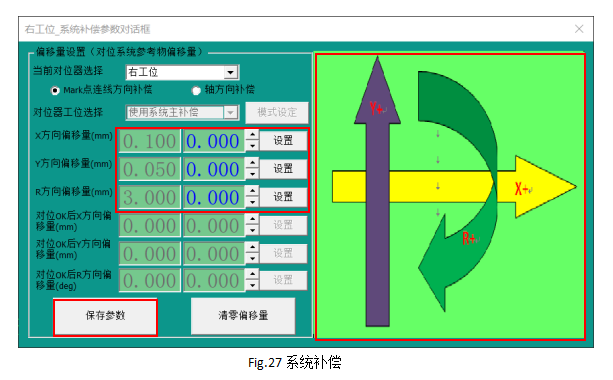
根据补偿方向图示,在右侧对应的方向补偿写入补偿数值后,点击“设置”累加到左侧的总补偿参数中。设置完补偿参数退出前必须要点击“保存参数”,补偿才能生效。








 932
932